I’ve been working on the X27 168 stepper controllers to find that there is no need to make a board for these steppers.
They can be connected directly to an I/O board with the following two limitations:
- It won’t be valid for high speed gauges (i.e Altimeter). This is because the motor has a 1:180 gear ratio and needs 6 steps for one motor turn. That gives us 1080 steps for a 360º dial.
- It will only valid for gauges with equally distributed scale.
Good thing is that we can use them for Cabin Press, EPU Fuel and Hyd Press gauges and even Clock and Fuel Gauge using the X40.879 which comes with a double coaxial independent shafts.
Regards,
Shep

Saturday, November 22, 2014
UHF Pcb for the PSCockpit System
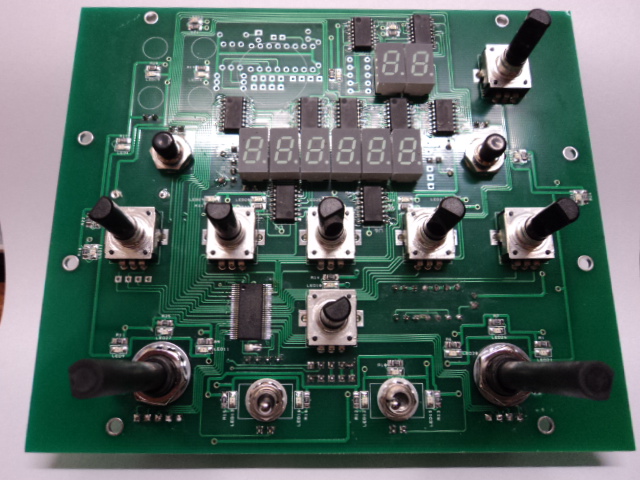
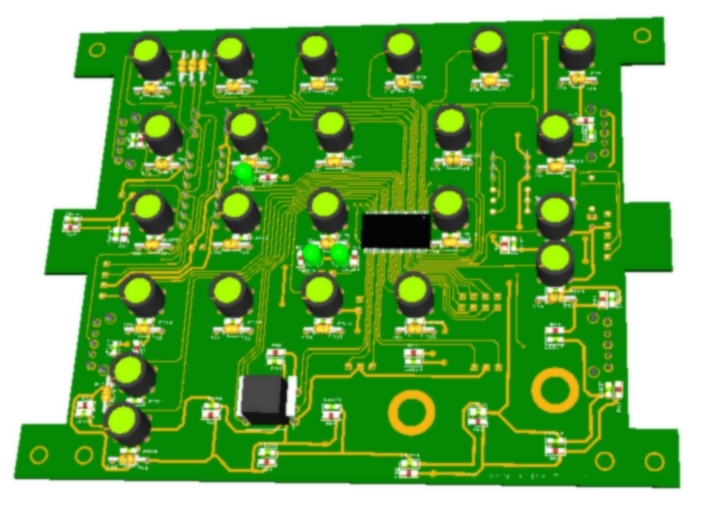
The new UHF board has been designed with (1) 40 I/O chip that can be connected to the digital I/O I2C channel of the PSCockpit system. It comes with corresponding elements (resistors, connectors …) to work with 5V and one selectable mini-switch to select the desire I2C address.
Also included are the following components:
- (2) Mini pushbuttons.
- (2) Rotary switches
- (7) Incremental encoders for digit selection, channel selection and volume.
- (9) 7 segment displays for frequency (6) and channel (3)
- (2) Mini toggle switches 3 positions
- SMD leds for lettering backlight.
You will find the following elements in the backside:
- (1) Connector for backlight illumination.
- (2) Connector for digital I/O I2C channel,
- (1) Miniswitch to select digital I2C channel address
- (1) Connector for free digital I/O of the 40 I/O board. You can use them to connect other switches.
To complete the UHF you will have to add by yourself the front UHF panel.
You can check the following dimensions of the UHF panel at
http://www.mediafire.com/view/u1924z4u3fj65el/UHFPanelFinal.PDF
Regards,
Shep
Thursday, November 6, 2014
PSCockpit A10C distribution file
For A10C supporters,
You can download the A10C Cockpit distribution file at:
http://www.mediafire.com/download/9c1olf99c9z7c8b/PSCockpitDist_A10C.rar
Regards,
Shep
You can download the A10C Cockpit distribution file at:
http://www.mediafire.com/download/9c1olf99c9z7c8b/PSCockpitDist_A10C.rar
Regards,
Shep
Tuesday, November 4, 2014
PSCockpit Caution Panel PCB and Caution Panel Extension PCB
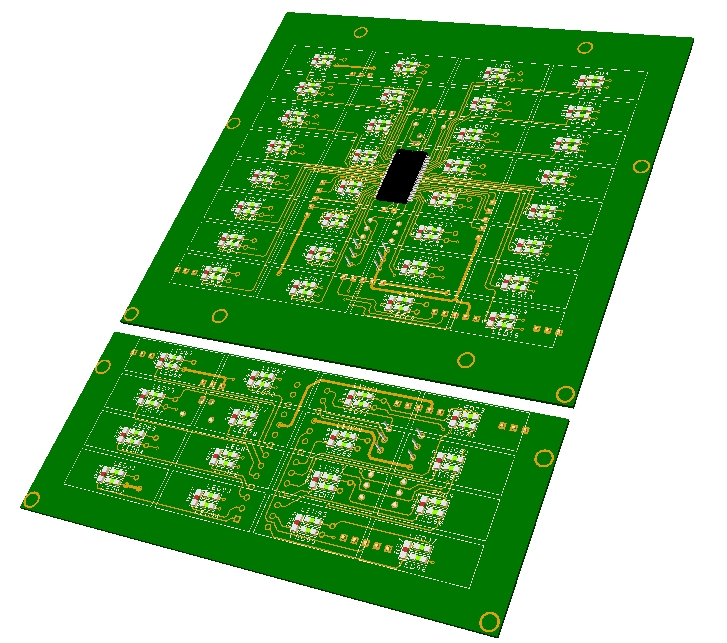
The PSCockpit Caution Panel PCB is ready to be connected to the PSCockpit system as an extension board in any of the I2C channels. It comes with its own 40 I/O chip and the selectable I2C address switch.
The Caution Panel Extension has been designed to extend the Caution Panel to be used in the A10 cockpit. It is connected to the Caution Panel and no more cables are required. It comes with its own 16 I/O chip and the selectable I2C address switch.
Just remember that you can only connect 8 extension boards per I2C channel.
Main Features:
- SMD leds in two colours -green and yellow- selectable by a rear switch.
- 8 free I/O in the Caution Panel.
- All connections in the back side.
Dimensions:
- Caution Panel pcb: 115,5 x 104 mm
- Caution Panel Extension pcb: 115,5 x 47 mm
Regards,
Shep
Sunday, November 2, 2014
PSCockpit System Fourth Run!!!
New run to adquire boards of the PSCockpit System.
Follow this link: http://www.viperpits.org/smf/index.php?topic=9774.msg133644#msg133644
Regards,
Shep
Follow this link: http://www.viperpits.org/smf/index.php?topic=9774.msg133644#msg133644
Regards,
Shep
Wednesday, May 21, 2014
Monday, May 12, 2014
HOW to Use AIRCORES in PSCockpit System
Implementing Aircores in PSCockpit System is not an easy task (at least at the beginning) as you have to deal with three different boards and some other configuration options. This guide will help you to find your way easily to reach your goal.
Basically, the system consists of 3 different boards:
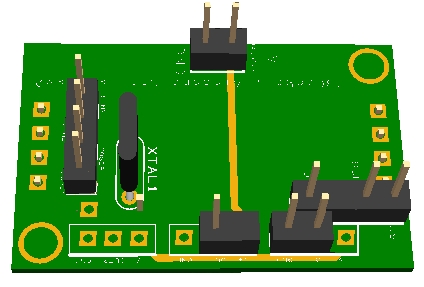
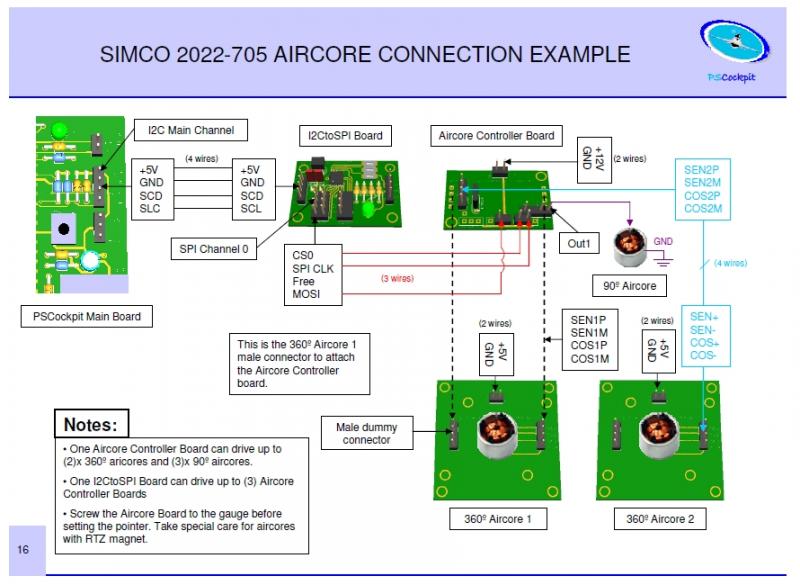
- I2CtoSPI pcb: This board is used to convert the I2C signal to SPI format. It must be connected to the I2C Main Channel of the PSCockpit Main Board to the Aircore Controller board:
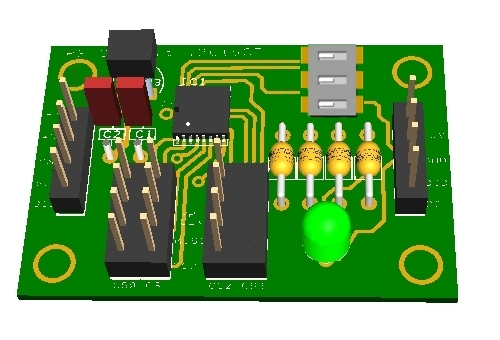
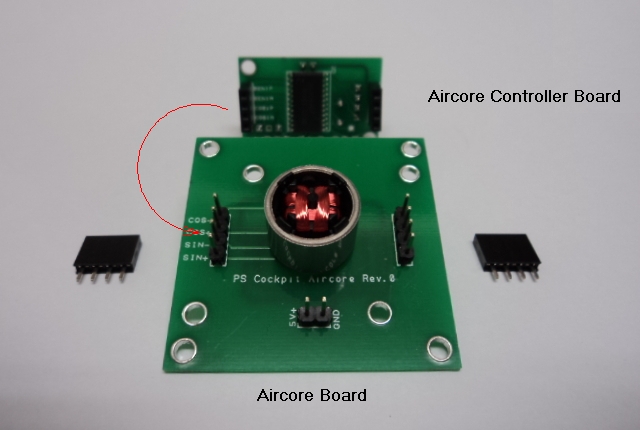
- Aircore Controller pcb: This board receives the SPI signal and drives (2) x 360º aircores plus (3) x 90º aircores. It must be connected to the I2CtoSPI board and to the Aircore pcb:
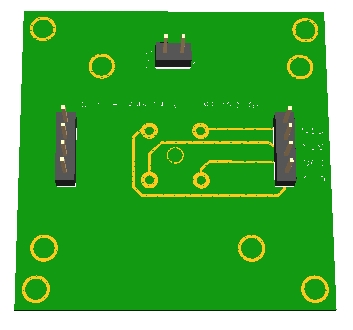
- Aircore pcb: This board supports the aircore and can be attached to your gauge. It must be connected to the Aircore Controller pcb:
The detail description of each board and the general overview of the system can be found in the PSCockpit System Quick Guide v2, which can be downloaded at http://www.mediafire.com/view/o7k6hvkt0y671iq/QuickGuideV2.pdf
Step 1: Placing your aircore in the Aircore pcb
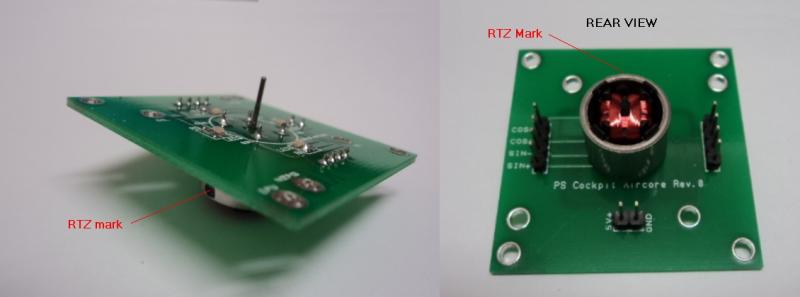
The supplied Simco 2022-705 aircores have terminals on the front and have a Return to Zero magnets (RTZ option). This option allows the aircore to return to zero position when power is deactivated. You must, then, find the correct position of the aircore motor in the aricore pcb in order to match the 0 physical position to the 0 electrical position, otherwise, once configured, the needle will point to other value of your gauge when power is off.
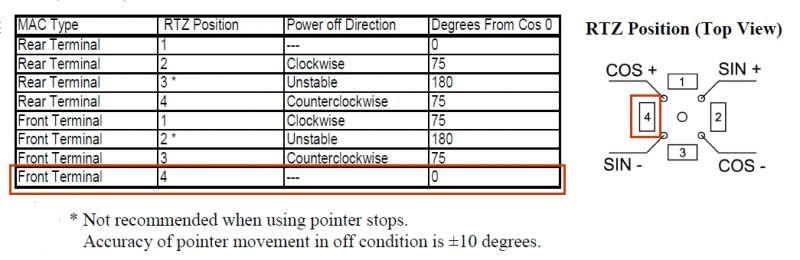
So, according to the Simco manual, the RTZ has to be located between cos+ and sen – terminals:
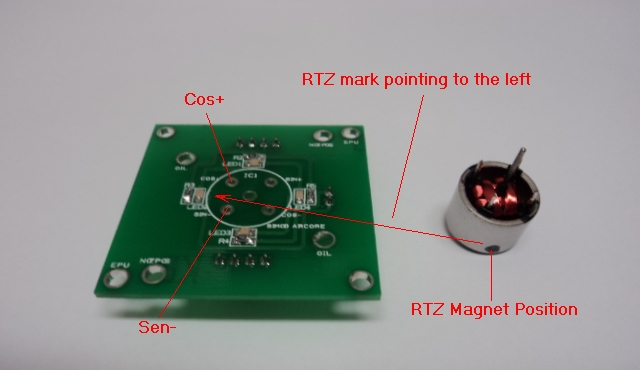
You will find a black mark on your aircore where the RTZ magnet is located:
And the final assembly:
Step 2: Attaching the Aircore Controller Board to the Aircore Board:
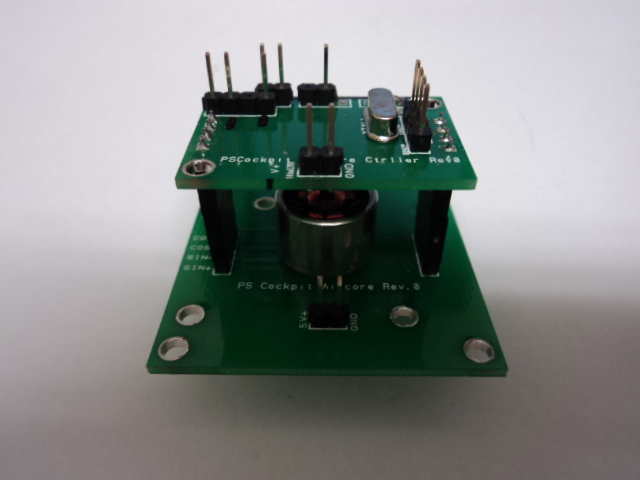
As the aircore body height is larger than the connectors, you will need two additional connectors which will act like spacers. Look for the correct position of the Aircore Controller board:
Aircore Controller Board attached to the Aircore board:
Step 3: Attaching the Aircore to your gauge
Use the holes of the Aircore board to fit it to your gauge plate. You will need some spacers to adjust the height of the aircore shaft:
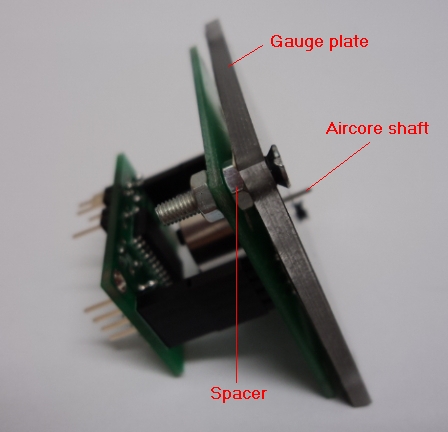
You can also cut the board carefully if it exceeds your gauge plate.
Now you can insert the pointing needle in to the aircore shaft pointing to the minimum value of your gauge scale:

Step 4: Connecting the Aircore Controller Board
Refer to the PSCockpit Guide v2 for details connections. Basically:
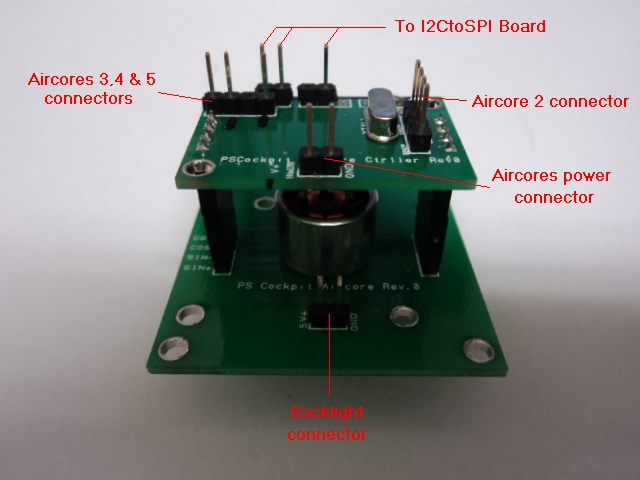
You can supply power to the Aircores power connector from 5V to 12V. With higher voltage the aircore will move faster and it will have more par but I found that 5V is more than enough for a weightless needle.
Step 5: Testing the aircore
Go to IOLayout page of the PSCockpit Software and select I2CtoSPI in the Expander address according the one selected in your board:
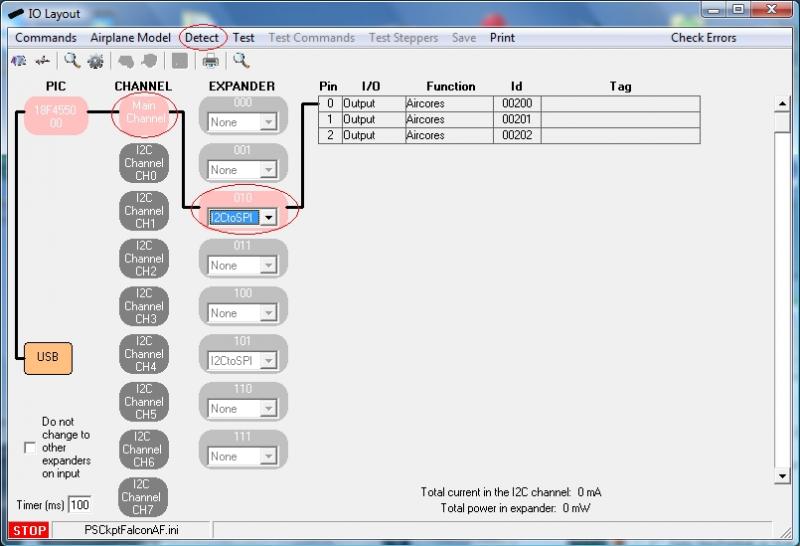
As the I2CtoSPI board can drive 3 Aircore Controller boards, you will see these 3 channels with different Ids. First Id (00200 in the picture) is the CS0 channel of your Aircore Controller board, second Id is the CS1 channel and third Id is the CS2 channel. CS3 channel of the I2CtoSPI board is not used and must remain unconnected.
Click on “Detect” and you will see the Expander in pink if the expander has been detected.
Click on “Test” and a “+” button will appear besides each of the Id channels. When you click on “+” button another screen will be opened showing the (2) x 360º and the (3) x 90º aircores connected to that channel. You can move any of the sliders and the aircore will move accordingly. You can also check the “Auto” check box to see the aircore moving continuously:
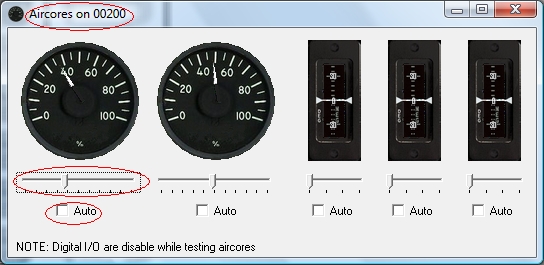
You can now power off your system and you will see the gauge needle returning to zero position.
Step 6: Configuring the Servos/PWM/Aircores
Since PSCockpit Software V 0.9.4 you can access directly to the Servos/PWM/Aircores configuration page. In this page you can configure the maximum/minimum scale of your gauge and the intermediate scales if your gauge has any.
To configure a desired aircore select the following parameters:
1. Select the aircore from the “Channel” display list. For each Id (SPI channel) you will see aircores from 0 to 4.
2. Select the sim value you want to be displayed on your gauge in the “Magnitude” display list.
3. Check the “Active” checkbox to enable the gauge.
4. Select the desire “Speed” of your gauge. Using the SSC-32 board for servos, this value will determine the microseconds will take the servo to go from one position to another. For the rest of the systems, aircores and servos with the Adafruit board, it is used to limit the minimum change of the variable to be sent to the gauge.
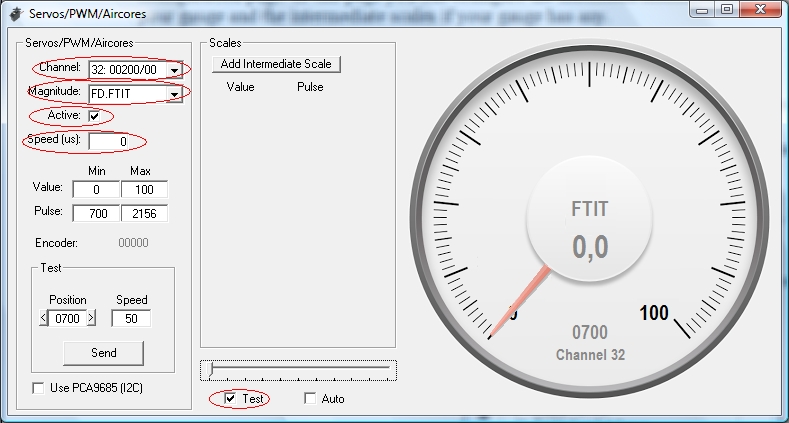
If you check the “Test” checkbox you can use the slider to move the selected gauge.
The first thing to do now is to find the lower and upper positions of your gauge and look what the pulses are the ones that match those positions. Move the slider (with the “Test” checkbox marked) to move your gauge needle until the lower value of your gauge is reached. The slider can be moved precisely with the left and right arrows of your keyboard once the slider is selected with your mouse. You will note that the “Position” value of the “Test” frame will change its value. When the gauge needle is in its lower position, this value has to be put in the Min Pulse box. Also put the minimum value of the gauge in the Min Value box:

To find the upper position of the gauge repeat this procedure by moving the slider and put the values in the Max Value and Max Pulse boxes:
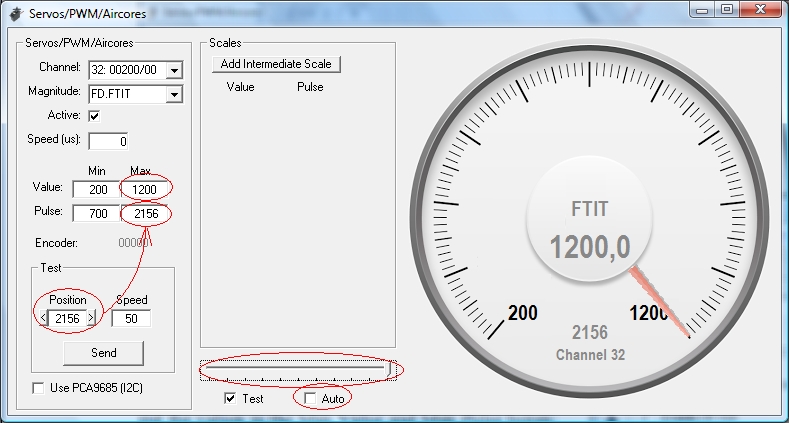
You can test your gauge by checking the “Auto” checkbox. You will see the gauge needle moving from the lower to upper positions without exceeding any of them. The “Speed” value of the Test frame is the amount added to the position, so you can reduce to a minimum of 10 to see your gauge moving smoothly.
Step 7: Adding intermediate scales to your gauge
If your gauge has different scales, you can add them easily by clicking on the “Add Intermediate Scale” button. Two text boxes will appear where you have to put the value and the pulse that correspond to that intermediate scale. Repeat the above procedure by moving the slider until the gauge needle is pointing to the intermediate scale value.
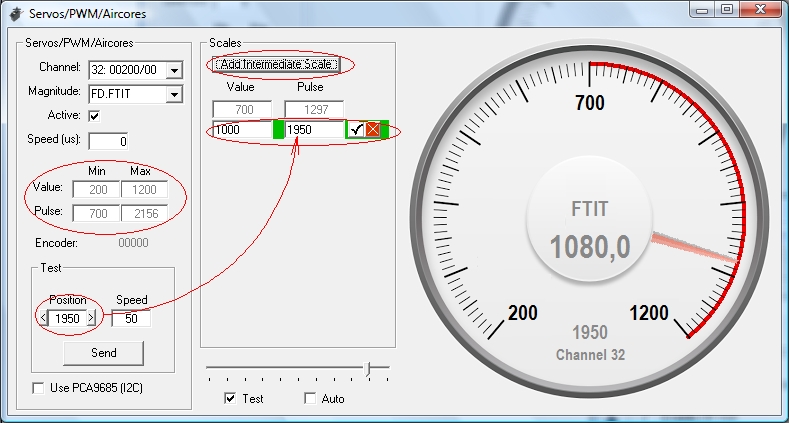
When any intermediate scale is added the minimum and maximum gauge values and pulses are disabled and can not be changed. To change these values you will have to remove the intermediate scales.
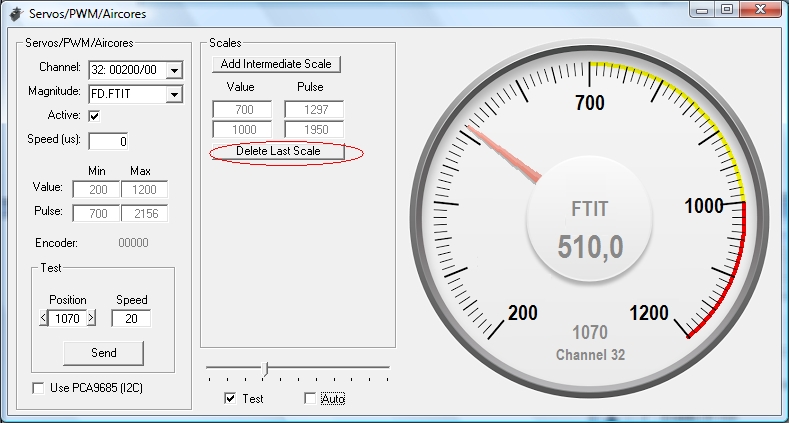
If you test your gauge now by selecting the “Auto” checkbox, you will see the gauge needle moving around the scales with different speeds.
Your aircore is now configured and you can use it with your favourite sim in Run mode of the PSCockpit Software.
One last consideration:
If you see your gauges moving a little jerky you can adjust them by setting the speed to 0 and resetting the timers on the “USB timers” page of the PSCockpit Software: try 10 ms for the “Sim data” timer and 0 for the “Between cycles” timer. Be aware that this will influence some other elements like encoders and/or 8x4 matrixes, so you will have to find the correct compromised values.
Regards,
Shep
Basically, the system consists of 3 different boards:
- I2CtoSPI pcb: This board is used to convert the I2C signal to SPI format. It must be connected to the I2C Main Channel of the PSCockpit Main Board to the Aircore Controller board:
- Aircore Controller pcb: This board receives the SPI signal and drives (2) x 360º aircores plus (3) x 90º aircores. It must be connected to the I2CtoSPI board and to the Aircore pcb:
- Aircore pcb: This board supports the aircore and can be attached to your gauge. It must be connected to the Aircore Controller pcb:
The detail description of each board and the general overview of the system can be found in the PSCockpit System Quick Guide v2, which can be downloaded at http://www.mediafire.com/view/o7k6hvkt0y671iq/QuickGuideV2.pdf
Step 1: Placing your aircore in the Aircore pcb
The supplied Simco 2022-705 aircores have terminals on the front and have a Return to Zero magnets (RTZ option). This option allows the aircore to return to zero position when power is deactivated. You must, then, find the correct position of the aircore motor in the aricore pcb in order to match the 0 physical position to the 0 electrical position, otherwise, once configured, the needle will point to other value of your gauge when power is off.
So, according to the Simco manual, the RTZ has to be located between cos+ and sen – terminals:
You will find a black mark on your aircore where the RTZ magnet is located:
And the final assembly:
Step 2: Attaching the Aircore Controller Board to the Aircore Board:
As the aircore body height is larger than the connectors, you will need two additional connectors which will act like spacers. Look for the correct position of the Aircore Controller board:
Aircore Controller Board attached to the Aircore board:
Step 3: Attaching the Aircore to your gauge
Use the holes of the Aircore board to fit it to your gauge plate. You will need some spacers to adjust the height of the aircore shaft:
You can also cut the board carefully if it exceeds your gauge plate.
Now you can insert the pointing needle in to the aircore shaft pointing to the minimum value of your gauge scale:
Step 4: Connecting the Aircore Controller Board
Refer to the PSCockpit Guide v2 for details connections. Basically:
You can supply power to the Aircores power connector from 5V to 12V. With higher voltage the aircore will move faster and it will have more par but I found that 5V is more than enough for a weightless needle.
Step 5: Testing the aircore
Go to IOLayout page of the PSCockpit Software and select I2CtoSPI in the Expander address according the one selected in your board:
As the I2CtoSPI board can drive 3 Aircore Controller boards, you will see these 3 channels with different Ids. First Id (00200 in the picture) is the CS0 channel of your Aircore Controller board, second Id is the CS1 channel and third Id is the CS2 channel. CS3 channel of the I2CtoSPI board is not used and must remain unconnected.
Click on “Detect” and you will see the Expander in pink if the expander has been detected.
Click on “Test” and a “+” button will appear besides each of the Id channels. When you click on “+” button another screen will be opened showing the (2) x 360º and the (3) x 90º aircores connected to that channel. You can move any of the sliders and the aircore will move accordingly. You can also check the “Auto” check box to see the aircore moving continuously:
You can now power off your system and you will see the gauge needle returning to zero position.
Step 6: Configuring the Servos/PWM/Aircores
Since PSCockpit Software V 0.9.4 you can access directly to the Servos/PWM/Aircores configuration page. In this page you can configure the maximum/minimum scale of your gauge and the intermediate scales if your gauge has any.
To configure a desired aircore select the following parameters:
1. Select the aircore from the “Channel” display list. For each Id (SPI channel) you will see aircores from 0 to 4.
2. Select the sim value you want to be displayed on your gauge in the “Magnitude” display list.
3. Check the “Active” checkbox to enable the gauge.
4. Select the desire “Speed” of your gauge. Using the SSC-32 board for servos, this value will determine the microseconds will take the servo to go from one position to another. For the rest of the systems, aircores and servos with the Adafruit board, it is used to limit the minimum change of the variable to be sent to the gauge.
If you check the “Test” checkbox you can use the slider to move the selected gauge.
The first thing to do now is to find the lower and upper positions of your gauge and look what the pulses are the ones that match those positions. Move the slider (with the “Test” checkbox marked) to move your gauge needle until the lower value of your gauge is reached. The slider can be moved precisely with the left and right arrows of your keyboard once the slider is selected with your mouse. You will note that the “Position” value of the “Test” frame will change its value. When the gauge needle is in its lower position, this value has to be put in the Min Pulse box. Also put the minimum value of the gauge in the Min Value box:
To find the upper position of the gauge repeat this procedure by moving the slider and put the values in the Max Value and Max Pulse boxes:
You can test your gauge by checking the “Auto” checkbox. You will see the gauge needle moving from the lower to upper positions without exceeding any of them. The “Speed” value of the Test frame is the amount added to the position, so you can reduce to a minimum of 10 to see your gauge moving smoothly.
Step 7: Adding intermediate scales to your gauge
If your gauge has different scales, you can add them easily by clicking on the “Add Intermediate Scale” button. Two text boxes will appear where you have to put the value and the pulse that correspond to that intermediate scale. Repeat the above procedure by moving the slider until the gauge needle is pointing to the intermediate scale value.
When any intermediate scale is added the minimum and maximum gauge values and pulses are disabled and can not be changed. To change these values you will have to remove the intermediate scales.
If you test your gauge now by selecting the “Auto” checkbox, you will see the gauge needle moving around the scales with different speeds.
Your aircore is now configured and you can use it with your favourite sim in Run mode of the PSCockpit Software.
One last consideration:
If you see your gauges moving a little jerky you can adjust them by setting the speed to 0 and resetting the timers on the “USB timers” page of the PSCockpit Software: try 10 ms for the “Sim data” timer and 0 for the “Between cycles” timer. Be aware that this will influence some other elements like encoders and/or 8x4 matrixes, so you will have to find the correct compromised values.
Regards,
Shep
Saturday, May 10, 2014
New version of the PSCockpit System firmware
To resolve a bug with the potentiometers full range connected to the Main Board, I have issued a new firmware version 1.5.2
You can download at:
http://www.mediafire.com/download/mbbalaimytpamsm/PSFirmUpdtv152.rar
Regards,
Shep
You can download at:
http://www.mediafire.com/download/mbbalaimytpamsm/PSFirmUpdtv152.rar
Regards,
Shep
Sunday, March 23, 2014
PSCockpit Quick Guide Version 2
PSCockpit Quick Guide Version 2 now available with the new boards added.
You can download at: http://www.mediafire.com/view/o7k6hvkt0y671iq/QuickGuideV2.pdf
Regards,
Shep
You can download at: http://www.mediafire.com/view/o7k6hvkt0y671iq/QuickGuideV2.pdf
Regards,
Shep
Friday, February 21, 2014
PSCockpit Software (v 0.9.6) and Firmware (v 1.5.1) update
Hi everybody,
I have updated the PSCockpit software to v.0.9.6 to solve the problem with the Adafruit board.
Sorry, one of my fingers deleted by mistake one line of the code in the last version.
Don't worry, I have cut that finger out of my hand....
Thanks to Dragun for his help on resolving the issue
You can download the PSCockpit Sofware v.0.9.6 (WIP) at:
http://www.mediafire.com/download/ff2fbfzvclumcph/PSCockpitV096.rar
Just unrar and move the PSCockpit.exe file to your PSCockpit folder.
Also you can find the last version of the firmware (v 1.5.1) at:
http://www.mediafire.com/download/dc553f6xymedrde/PSFirmUpdtv151.rar
PSCockpit System Firmware v.1.5.1 Changelog:
- Added I2CtoSPI board controller
- Added Aircores board controller
- Added OLED display configuration
- Corrected a reverse video OLED display bug
Regards,
Shep
I have updated the PSCockpit software to v.0.9.6 to solve the problem with the Adafruit board.
Sorry, one of my fingers deleted by mistake one line of the code in the last version.
Don't worry, I have cut that finger out of my hand....
Thanks to Dragun for his help on resolving the issue
You can download the PSCockpit Sofware v.0.9.6 (WIP) at:
http://www.mediafire.com/download/ff2fbfzvclumcph/PSCockpitV096.rar
Just unrar and move the PSCockpit.exe file to your PSCockpit folder.
Also you can find the last version of the firmware (v 1.5.1) at:
http://www.mediafire.com/download/dc553f6xymedrde/PSFirmUpdtv151.rar
PSCockpit System Firmware v.1.5.1 Changelog:
- Added I2CtoSPI board controller
- Added Aircores board controller
- Added OLED display configuration
- Corrected a reverse video OLED display bug
Regards,
Shep
Sunday, February 16, 2014
PSCockpit Software Update v 0.9.5 (WIP)
This version of the PSCockpit software correct the following bugs:
- Lines in the Layout aren't deleted.
- Adafruit servos.
You can download the new version v.0.9.5 (WIP) at: http://www.mediafire.com/download/h3ahu12606t7m9s/PSCockpitV095.rar
Just unrar and copy it to the PSCockpit directory.
Regards,
Shep
- Lines in the Layout aren't deleted.
- Adafruit servos.
You can download the new version v.0.9.5 (WIP) at: http://www.mediafire.com/download/h3ahu12606t7m9s/PSCockpitV095.rar
Just unrar and copy it to the PSCockpit directory.
Regards,
Shep
Sunday, January 26, 2014
New PSCockpit Boards
Hello everybody,
After several days of hard work, I am glad to announce that the aircores are up and running!!
Nevertheless, I still have to work on the software to adapt the values extracted from the sim and the scales of the gauges to the special way they work and test them on duty.
Some pictures of the new boards:
ICP:
 Vib motors:
Vib motors:

Regards,
Shep
After several days of hard work, I am glad to announce that the aircores are up and running!!
Nevertheless, I still have to work on the software to adapt the values extracted from the sim and the scales of the gauges to the special way they work and test them on duty.
Some pictures of the new boards:
ICP:
Regards,
Shep
Monday, January 6, 2014
PSCockpit Software Version 0.9.4 (WIP)
Happy New
Year for everybody!!
This version
is still a WIP version with much new functionality not totally tested, but I'm
publishing it to solve some bugs detected with the Adafruit board and to
improve the encoder’s functionality.
CHANGELOG V
0.9.4 (WIP)
======================
- Corrected
an error sending Adafruit PWM values (Thanks Cester!!)- Added option to sync sim with cockpit switches (PSCockpit page)
- Lights, servos and 7 Segment Displays, extracted from the sim can be seen in the Airplane Model
- Servos/PWM/Aircore scales (Airplane Model)
- Airplane selection (PSCockpit Menu)
- A10C Model implemented (Airplane Model)
- F104G Model implemented (Airplane model)
- Corrected USB driver to plug/unplug and switch on/off the board with the PSCockpit software running
- Implemented Error handling to avoid errors when entering in AWACS (BMS)
- Added wave files for Bass Shakers and sound device selection (Vibration Effects page )
- Analog outputs implemented (F16 Model-AnalogI/Os page)
- Print commands (Commands page)
- Added SLG2016 driver for 2 and
- Added DED and PFL brightness inputs from pots (F16 Model-Pots page)
- POWER_OFF bit implemented in F16 Model (Special I/Os page)
- Added leds to DX Joystick pushbuttons when active in Joystick (Assignments page)
- Added Inverse checkbox for the encoders (Commands-Encoders page)
- Encoders routine improved
You can
download it HERE.
Regards,
Shep
Saturday, January 4, 2014
New Version of PSUDP Updated for Android 4.0
PSUdp extracts the flight data from Open Falcon, Falcon AF and Falcon BMS flight simulators acting like a server and send this data to an android mobile device running the client application PS Gauges trough the TCP/UDP net protocol.
- Updated PSGauges.apk for Android 4.0
- Fixed the problem with the local IP address by using the WIFI IP address.
- Update for BMS 4.32 up 6.
You can download the installation file here: PSUDPv09
Installation notes:
- Unrar the file
- Install PS UDP in your computer with PSUdpSetUp.exe
- Install PSGauges.apk in all your favorite android devices
- Read HelpV09.txt!!
- Enjoy
Regards,
Shep
PS UDP Falcon supports 5 clients connected at the same time so you can use five different android devices. Three of them are used for flight data, one for the left MFD, one for the right MFD and one for the HUD.
PS Gauges client application needs Android 4.0
PS Gauges can display in your mobile device the following instruments: RPM, RWR, HSI, DED, PFL, ADI, VVI, AOA, ASI, ALT, CMPSS, CP, FFI, FI, ICP, LMFD, HUD and RMFD.
- Updated PSGauges.apk for Android 4.0
- Fixed the problem with the local IP address by using the WIFI IP address.
- Update for BMS 4.32 up 6.
You can download the installation file here: PSUDPv09
Installation notes:
- Unrar the file
- Install PS UDP in your computer with PSUdpSetUp.exe
- Install PSGauges.apk in all your favorite android devices
- Read HelpV09.txt!!
- Enjoy
Regards,
Shep
Subscribe to:
Posts (Atom)